<xs:group name="RigidBodyCollectionContentModel">
<xs:annotation>
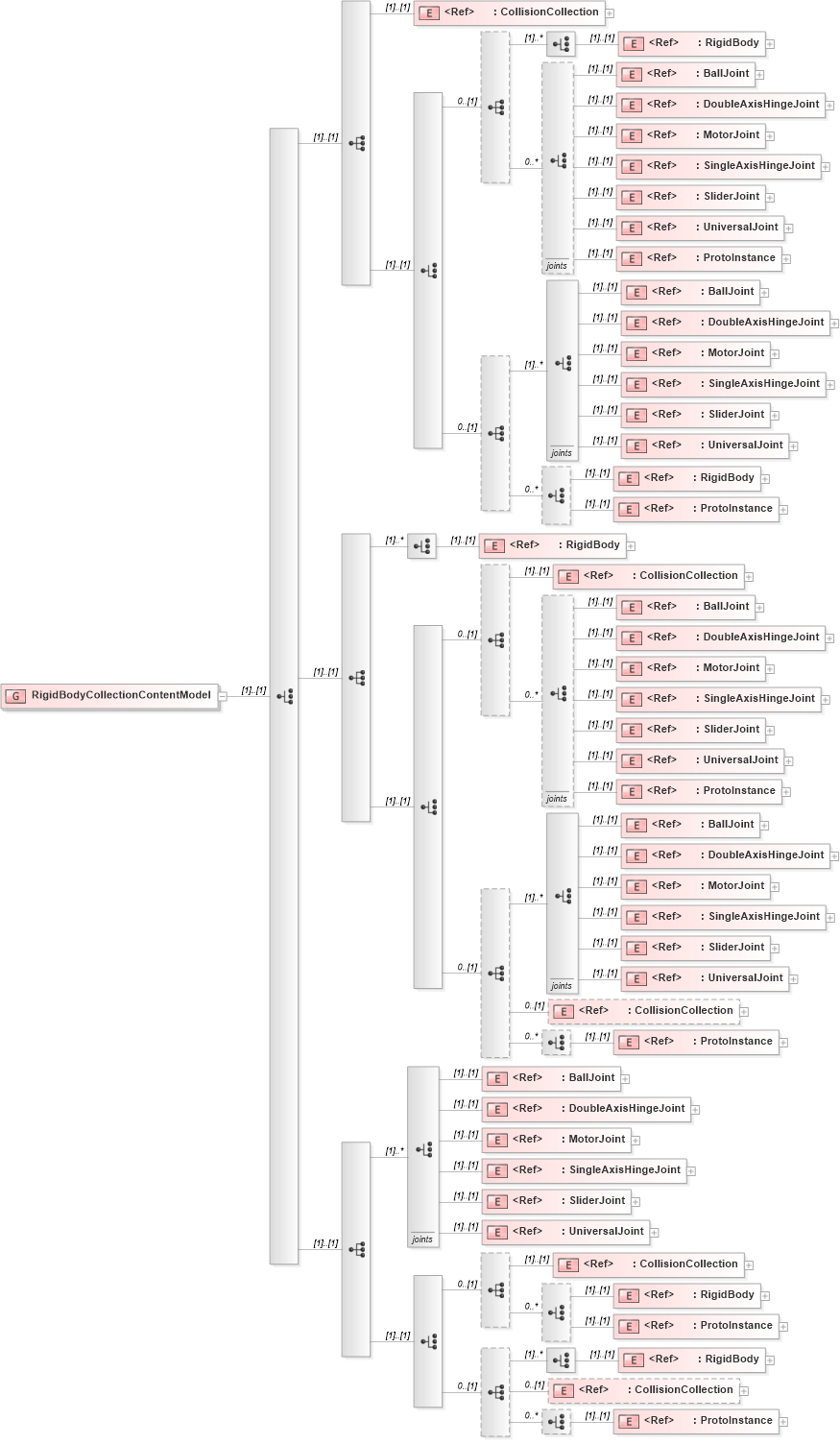
<xs:appinfo>RigidBodyCollectionContentModel can contain RigidBody nodes as a bodies field, plus X3DRigidJointNode nodes as a joints field, plus a CollisionCollection node as a collider field.
</xs:appinfo>
<xs:documentation />
</xs:annotation>
<!-- TODO: incomplete -->
<xs:choice>
<xs:sequence>
<xs:element ref="CollisionCollection">
<xs:annotation>
<xs:documentation>collider</xs:documentation>
</xs:annotation>
</xs:element>
<xs:choice>
<xs:sequence minOccurs="0">
<xs:choice maxOccurs="unbounded">
<xs:element ref="RigidBody">
<xs:annotation>
<xs:documentation>bodies</xs:documentation>
</xs:annotation>
</xs:element>
</xs:choice>
<xs:choice minOccurs="0" maxOccurs="unbounded">
<xs:annotation>
<xs:documentation>joints</xs:documentation>
</xs:annotation>
<xs:element ref="BallJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="DoubleAxisHingeJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="MotorJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="SingleAxisHingeJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="SliderJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="UniversalJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="ProtoInstance" />
</xs:choice>
</xs:sequence>
<xs:sequence minOccurs="0">
<xs:choice maxOccurs="unbounded">
<xs:annotation>
<xs:documentation>joints</xs:documentation>
</xs:annotation>
<xs:element ref="BallJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="DoubleAxisHingeJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="MotorJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="SingleAxisHingeJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="SliderJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="UniversalJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
</xs:choice>
<xs:choice minOccurs="0" maxOccurs="unbounded">
<xs:element ref="RigidBody">
<xs:annotation>
<xs:documentation>bodies</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="ProtoInstance" />
</xs:choice>
</xs:sequence>
</xs:choice>
</xs:sequence>
<xs:sequence>
<xs:choice maxOccurs="unbounded">
<xs:element ref="RigidBody">
<xs:annotation>
<xs:documentation>bodies</xs:documentation>
</xs:annotation>
</xs:element>
</xs:choice>
<xs:choice>
<xs:sequence minOccurs="0">
<xs:element ref="CollisionCollection">
<xs:annotation>
<xs:documentation>collider</xs:documentation>
</xs:annotation>
</xs:element>
<xs:choice minOccurs="0" maxOccurs="unbounded">
<xs:annotation>
<xs:documentation>joints</xs:documentation>
</xs:annotation>
<xs:element ref="BallJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="DoubleAxisHingeJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="MotorJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="SingleAxisHingeJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="SliderJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="UniversalJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="ProtoInstance" />
</xs:choice>
</xs:sequence>
<xs:sequence minOccurs="0">
<xs:choice maxOccurs="unbounded">
<xs:annotation>
<xs:documentation>joints</xs:documentation>
</xs:annotation>
<xs:element ref="BallJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="DoubleAxisHingeJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="MotorJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="SingleAxisHingeJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="SliderJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="UniversalJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
</xs:choice>
<xs:element ref="CollisionCollection" minOccurs="0">
<xs:annotation>
<xs:documentation>collider</xs:documentation>
</xs:annotation>
</xs:element>
<xs:choice minOccurs="0" maxOccurs="unbounded">
<xs:element ref="ProtoInstance" />
</xs:choice>
</xs:sequence>
</xs:choice>
</xs:sequence>
<xs:sequence>
<xs:choice maxOccurs="unbounded">
<xs:annotation>
<xs:documentation>joints</xs:documentation>
</xs:annotation>
<xs:element ref="BallJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="DoubleAxisHingeJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="MotorJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="SingleAxisHingeJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="SliderJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="UniversalJoint">
<xs:annotation>
<xs:documentation>massDensityModel</xs:documentation>
</xs:annotation>
</xs:element>
</xs:choice>
<xs:choice>
<xs:sequence minOccurs="0">
<xs:element ref="CollisionCollection">
<xs:annotation>
<xs:documentation>collider</xs:documentation>
</xs:annotation>
</xs:element>
<xs:choice minOccurs="0" maxOccurs="unbounded">
<xs:element ref="RigidBody">
<xs:annotation>
<xs:documentation>bodies</xs:documentation>
</xs:annotation>
</xs:element>
<xs:element ref="ProtoInstance" />
</xs:choice>
</xs:sequence>
<xs:sequence minOccurs="0">
<xs:choice maxOccurs="unbounded">
<xs:element ref="RigidBody">
<xs:annotation>
<xs:documentation>bodies</xs:documentation>
</xs:annotation>
</xs:element>
</xs:choice>
<xs:element ref="CollisionCollection" minOccurs="0">
<xs:annotation>
<xs:documentation>collider</xs:documentation>
</xs:annotation>
</xs:element>
<xs:choice minOccurs="0" maxOccurs="unbounded">
<xs:element ref="ProtoInstance" />
</xs:choice>
</xs:sequence>
</xs:choice>
</xs:sequence>
</xs:choice>
</xs:group>
|